众所周知,无人机已经应用于各大领域,包括边防检查、森林防火、电力巡检、新闻采集以及商业宣传等方面。

首先拿集中式控制来说,有控制中心,控制效率较高,但核心无人机被击落后,系统就会陷入奔溃,无法继续执行任务。
了解无人机分布式控制之后,一起来了解下基于分布式控制的几种控制方法吧!
(1)基于长机-僚机的分布式编队控制方法长机-僚机法的基本思想是:leader-follower机制,在多无人机组成的群体中,某架无人机作为整个编队的领导者,并作为第一优先级,向第二优先级(第二阶梯僚机)传送信息,以此类推,各僚机分别向比自己低一级的僚机传送信息,完成无人机间的信息通讯,达到队形控制的目的。但这种控制方法鲁棒性较差,没有精确的队形反馈,一旦长机出现问题,系统信息传送不到位,那么整个系统就会处于瘫痪状态。为了解决这种控制方式产生的弊端,提出leader-candidate-follower机制,通过从candidate中选举产生下一任长机,故此来弥补鲁棒性差这一问题,从而实现编队的稳定飞行。(Raft算法实现)
(2)基于行为的分布式编队控制基于行为法的分布式控制思想是根据对无人机系统实施控制作用后所期望产生的整体行为模式,事先对每个无人机的个体行为规则和局部控制方案进行设计,这是一种先果后因的运动控制方法。通常每个无人机的行为模式类似于“库函数”一样存储于编队控制器中,在系统运行时,根据环境信息和控制指令的变化执行相应的行为方式,如避障、队形组成、队形切换、方向运动等。例如,在进行避障时,编队无人机在移动过程中要避免与障碍物和其他相邻飞机的碰撞,那么,当无人机通过传感器系统感知外界环境变换时,整个系统就会根据系统输入,选取行为模式,达到期望的行为,进而作出系统响应并输出。与领航跟随者不同之处在于,该方法中的协作作用是通过无人机之间的位置、状态输入值等信息的共享来实现的。每架无人机只需知道相邻无人机的信息就可以,减少了信息的获取,同时减少了计算量,系统实现较为简单。缺点在于很难描述群体的动态特性,难以进行精确控制,队形保持的稳定性不易控制。
(3)基于人工势场的分布式编队控制法人工势场法基于无人机间的相互作用力,即引力场与斥力场,环境中的障碍物对无人机产生排斥力,而目标点对无人机产生吸引力,在合力的作用下,使得无人机沿最小化势能方向运动。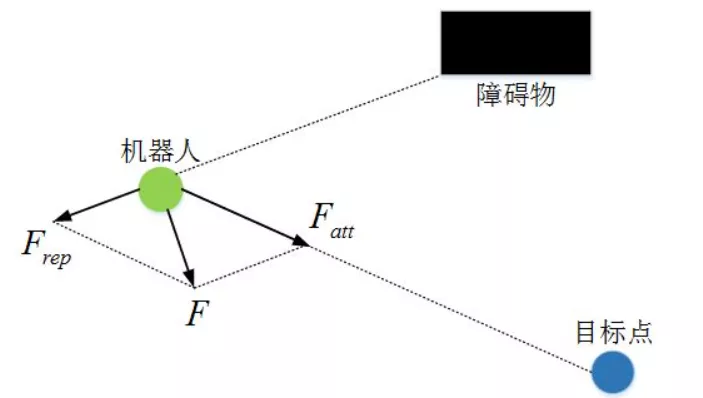
(4)基于虚拟结构的分布式编队控制方法将无人机的编队看作一种刚性的虚拟结构。每一个无人机可以看作在这个虚拟结构中一个固定的点。编队中的无人机个体直接跟踪保持虚拟结构上的固定坐标点就可以完成设定好的编队飞行巡检路线。以虚拟结构为框架,在编队控制算法中加入队形反馈,邻近的分散编队控制器之间进行通讯和信息传输,使得编队控制器既能控制编队的速度,又能很好的保持队形。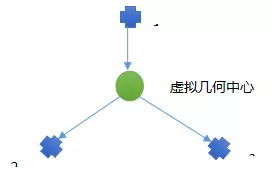
作者:阿木实验室:木十
- End –
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。